项目介绍

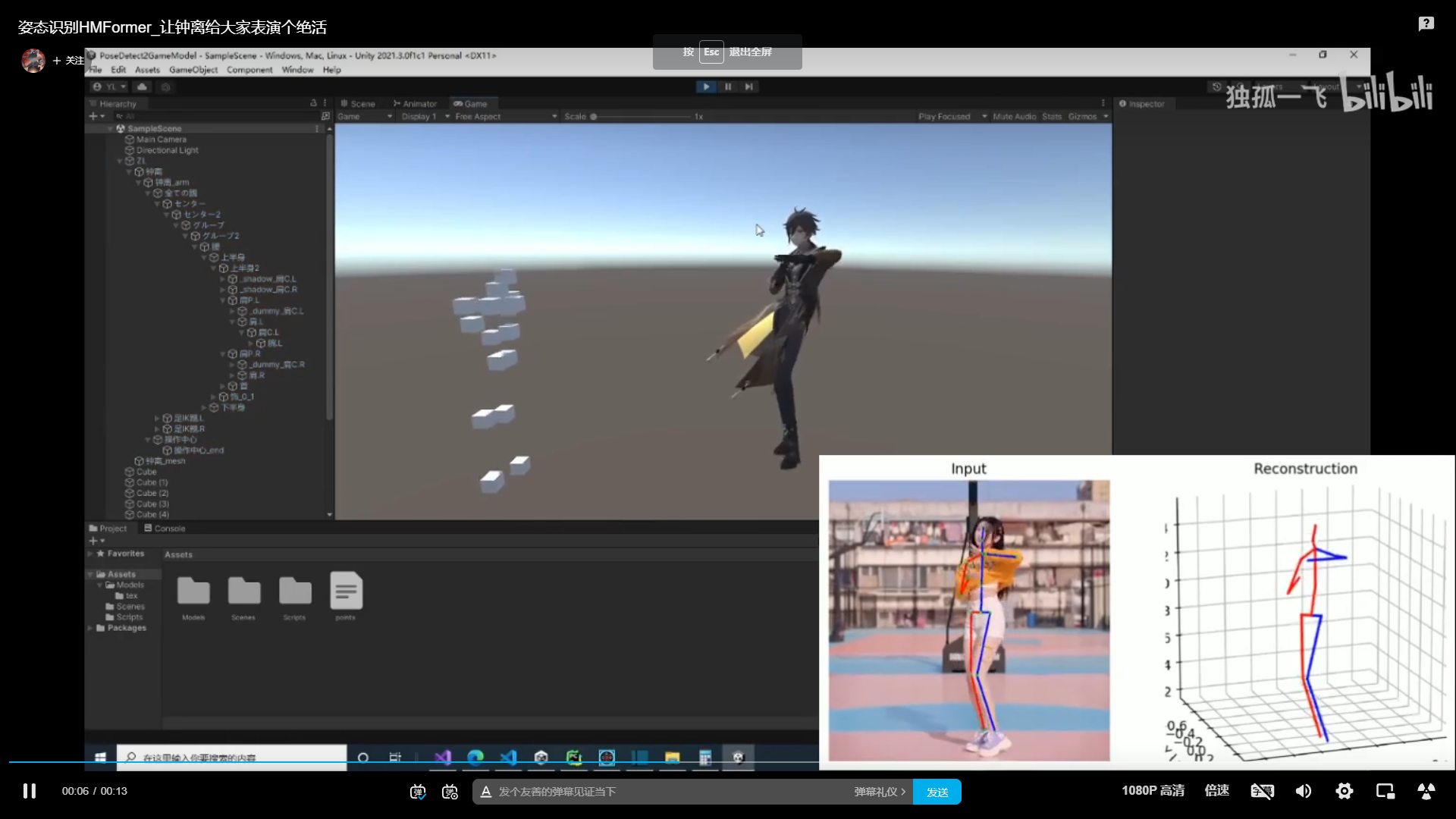
使用HMFormer进行非实时姿态估计,并使用unity读取结果以控制模型骨骼
项目地址: https://github.com/DuGuYifei/PoseDetect2UnityModel
视频地址:https://www.bilibili.com/video/BV1M14y1v73w/
GitHub - Vegetebird/MHFormer: [CVPR 2022] MHFormer: Multi-Hypothesis Transformer for 3D Human Pose Estimation
研究完源码发现结果在:
在函数get_pose3D(video_path, output_dir): 中:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
|
fig = plt.figure(figsize=(9.6, 5.4))
gs = gridspec.GridSpec(1, 1)
gs.update(wspace=-0.00, hspace=0.05)
ax = plt.subplot(gs[0], projection='3d')
ax.set_xlabel('X Label')
ax.set_ylabel('Y Label')
ax.set_zlabel('Z Label')
with open('points.txt', 'ab') as f:
np.savetxt(f, post_out, delimiter="\n")
show3Dpose(post_out, ax)
output_dir_3D = output_dir + 'pose3D/'
os.makedirs(output_dir_3D, exist_ok=True)
plt.savefig(output_dir_3D + str(('%04d' % i)) + '_3D.png', dpi=200, format='png', bbox_inches='tight')
|
在unity中尝试获取姿态估计结果顺序:
1
2
3
4
5
6
7
8
| 右 左
10
9
16 15 14 8 11 12 13
7
1 0 4
2 5
3 6
|
原神官方模型问题
- 由于是MMD常用的pmx模型,所以先经过Blender将其转换为fbx后发现丢失材质
- 使用blender转换为obj发现材质为反
- 使用PmxEditor只能输出没有骨骼的obj
- 如果使用blender的obj需要将贴图旋转180度再镜像翻转
- 为了使用骨骼,将blender的材质为反的obj放入fbx材质自动为正
不同部位的材质怎么区分
obj的文件可以直接按文本打开:
其中这一行为贴图配置文件名
打开贴图配置文件:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| newmtl m0
map_Kd tex/面.png
Ka 0.5 0.5 0.5
Kd 1 1 1
Ks 0 0 0
Ns 5
d 1
newmtl m1
map_Kd tex/面.png
Ka 0.5 0.5 0.5
Kd 1 1 1
Ks 0 0 0
Ns 5
d 1
|
- m0,m1 是在unity中obj可见的材质名
- 面/png 是材质所需贴图的文件名
- m0 m1 其实是一样的,但是又有细微差别,不过暂时没有发现导致差别的规律,所以即使都放一样的问题也不大,最终也只有一个吊坠的一个小珠子颜色错了
获取骨骼
模型部分
模型 Rig -> animation type -> 选择 Humanoid -> 点击configure
将各部分给到位,注意存在父子关系。
代码部分
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
| public Animator animator;
hip = animator.GetBoneTransform(HumanBodyBones.Hips);
leftUpperLeg = animator.GetBoneTransform(HumanBodyBones.LeftUpperLeg);
rightUpperLeg = animator.GetBoneTransform(HumanBodyBones.RightUpperLeg);
leftLowerLeg = animator.GetBoneTransform(HumanBodyBones.LeftLowerLeg);
rightLowerLeg = animator.GetBoneTransform(HumanBodyBones.RightLowerLeg);
spine = animator.GetBoneTransform(HumanBodyBones.Spine);
chest = animator.GetBoneTransform(HumanBodyBones.Chest);
neck = animator.GetBoneTransform(HumanBodyBones.Neck);
head = animator.GetBoneTransform(HumanBodyBones.Head);
leftShoulder = animator.GetBoneTransform(HumanBodyBones.LeftShoulder);
rightShoulder = animator.GetBoneTransform(HumanBodyBones.RightShoulder);
leftUpperArm = animator.GetBoneTransform(HumanBodyBones.LeftUpperArm);
rightUpperArm = animator.GetBoneTransform(HumanBodyBones.RightUpperArm);
leftLowerArm = animator.GetBoneTransform(HumanBodyBones.LeftLowerArm);
rightLowerArm = animator.GetBoneTransform(HumanBodyBones.RightLowerArm);
|
1
| public Transform botBody;
|
对骨骼进行旋转
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
| frame = points[frameIndex];
for(int i = 0; i < 17; i++)
{
cubes[i].position = frame[i];
}
Vector3 temp = frame[1] - frame[0];
temp = Vector3.ProjectOnPlane(temp, hip.up);
temp = Quaternion.AngleAxis(270, hip.up) * temp;
hip.rotation = Quaternion.LookRotation(temp, hip.up);
rightUpperLeg.rotation = Quaternion.LookRotation(rightUpperLeg.forward, frame[1] - frame[2]);
leftUpperLeg.rotation = Quaternion.LookRotation(leftUpperLeg.forward, frame[4] - frame[5]);
rightLowerLeg.rotation = Quaternion.LookRotation(rightLowerLeg.forward, frame[2] - frame[3]);
leftLowerLeg.rotation = Quaternion.LookRotation(leftLowerLeg.forward, frame[5] - frame[6]);
spine.rotation = Quaternion.LookRotation(spine.forward, frame[7] - frame[0]);
chest.rotation = Quaternion.LookRotation(chest.forward, frame[8] - frame[7]);
rightShoulder.rotation = Quaternion.LookRotation(rightShoulder.forward, frame[14] - frame[8]);
leftShoulder.rotation = Quaternion.LookRotation(leftShoulder.forward, frame[11] - frame[8]);
temp = frame[15] - frame[14];
rightUpperArm.rotation = Quaternion.LookRotation(Vector3.Cross(rightUpperArm.right, temp), temp);
temp = frame[12] - frame[11];
leftUpperArm.rotation = Quaternion.LookRotation(Vector3.Cross(leftUpperArm.right, temp), temp);
temp = frame[16] - frame[15];
rightLowerArm.rotation = Quaternion.LookRotation(Vector3.Cross(rightLowerArm.right, temp), temp);
temp = frame[13] - frame[12];
leftLowerArm.rotation = Quaternion.LookRotation(Vector3.Cross(leftLowerArm.right, temp), temp);
neck.rotation = Quaternion.LookRotation(neck.forward, frame[9] - frame[8]);
head.rotation = Quaternion.LookRotation(head.forward);
frameIndex++;
if (frameIndex == frameNum)
{
frameIndex = 0;
}
|
其中
- 使用叉积是因为根据具体点的位置只能获取其中一个方向,另一个方向在假定最后一个方向不变的情况下,通过叉积求出来
- 对于hip使用的计算:
- 由于模型的hip并不是正朝上而是一个奇怪的角度,所以不能直接使用左右腿的差值向量
- 差值向量需要按hip的local坐标系旋转90度以找到该差值向量对应的forward,因为该差值属于right
- 不能直接旋转90度,需要将其投影到hip坐标系的forward和right组成的平面上再旋转
temp = Vector3.ProjectOnPlane(temp, hip.up);中使用hip.up是因为这是所需平面的法向量
帧数
使用 Time.fixedDeltaTime调节FixedUpdate的帧数
 使用HMFormer进行非实时姿态估计,并使用unity读取结果以控制模型骨骼
使用HMFormer进行非实时姿态估计,并使用unity读取结果以控制模型骨骼